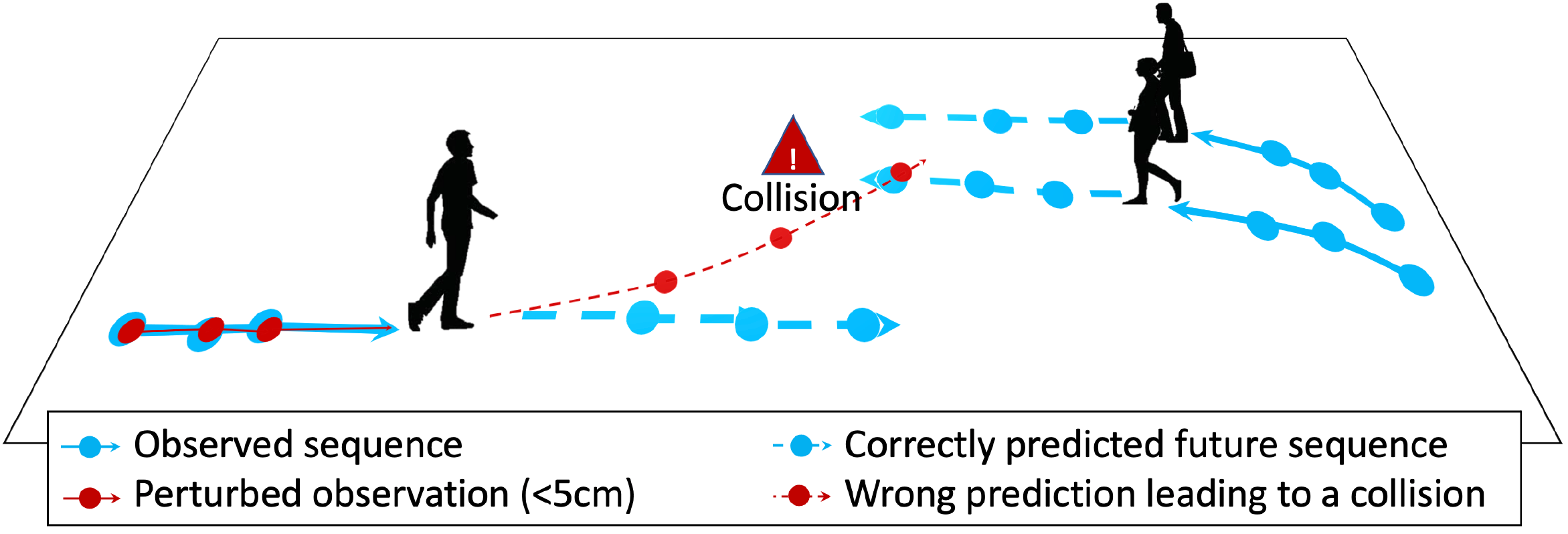
Given the observation trajectories of the agents in the scene,
a predictor (here S-LSTM) forecasts the future positions reasonably (blue lines).
However, with less than 5cm perturbation in the observation trajectory (in red),
an unacceptable collision is predicted.