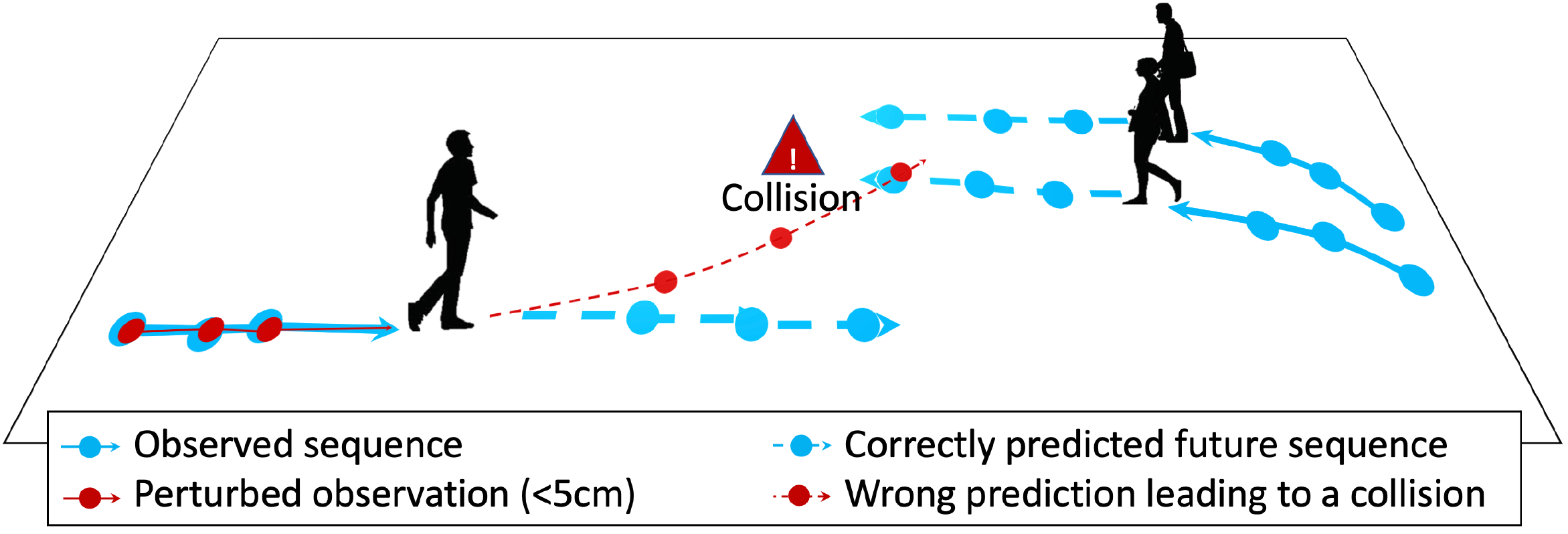
Are socially-aware trajectory prediction models
?really socially-awareGiven the observation trajectories of the agents in the scene, a predictor (here S-LSTM) forecasts the future positions reasonably (blue lines). However, with less than 5cm perturbation in the observation trajectory (in red), an unacceptable collision is predicted.
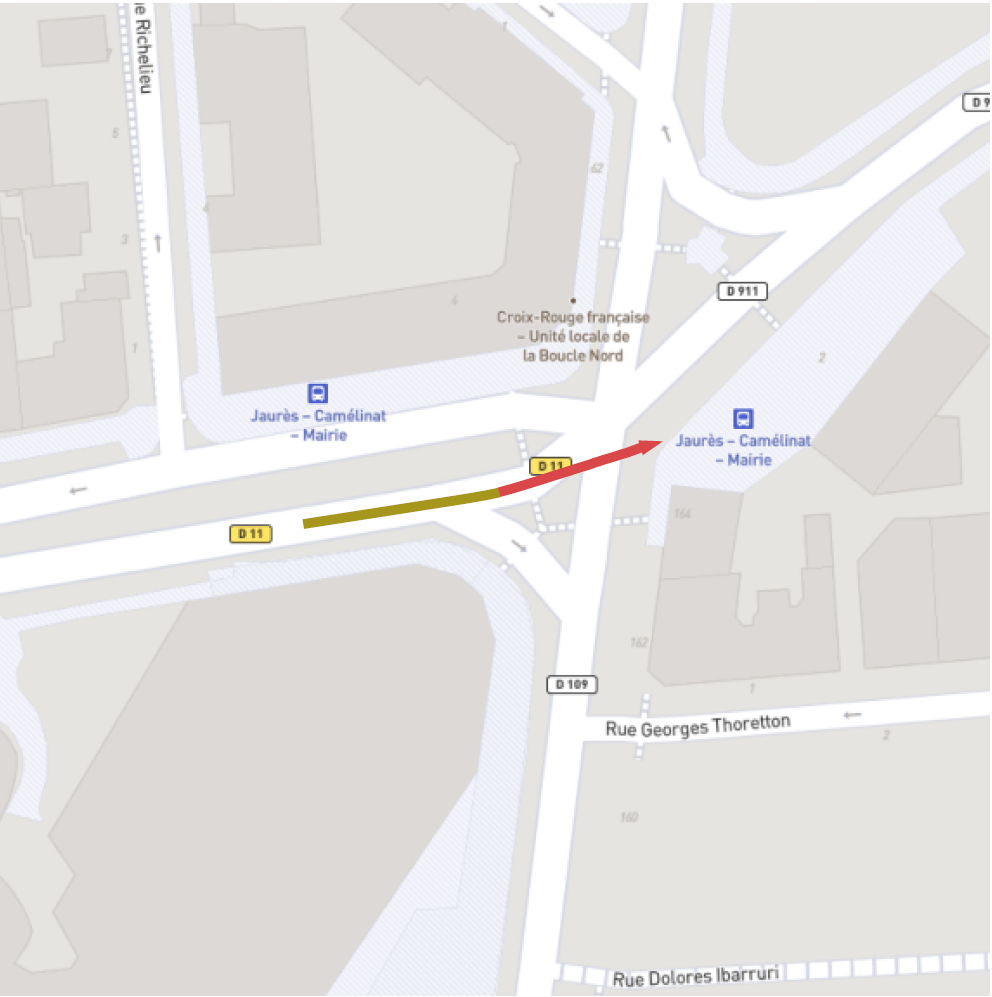
Vehicle trajectory prediction works, but not everywhere
A real-world place in Paris where the trajectory prediction model (here LaneGCN) fails. We find this place by retrieving real-world locations which resemble our conditional generated scenes for the prediction model.
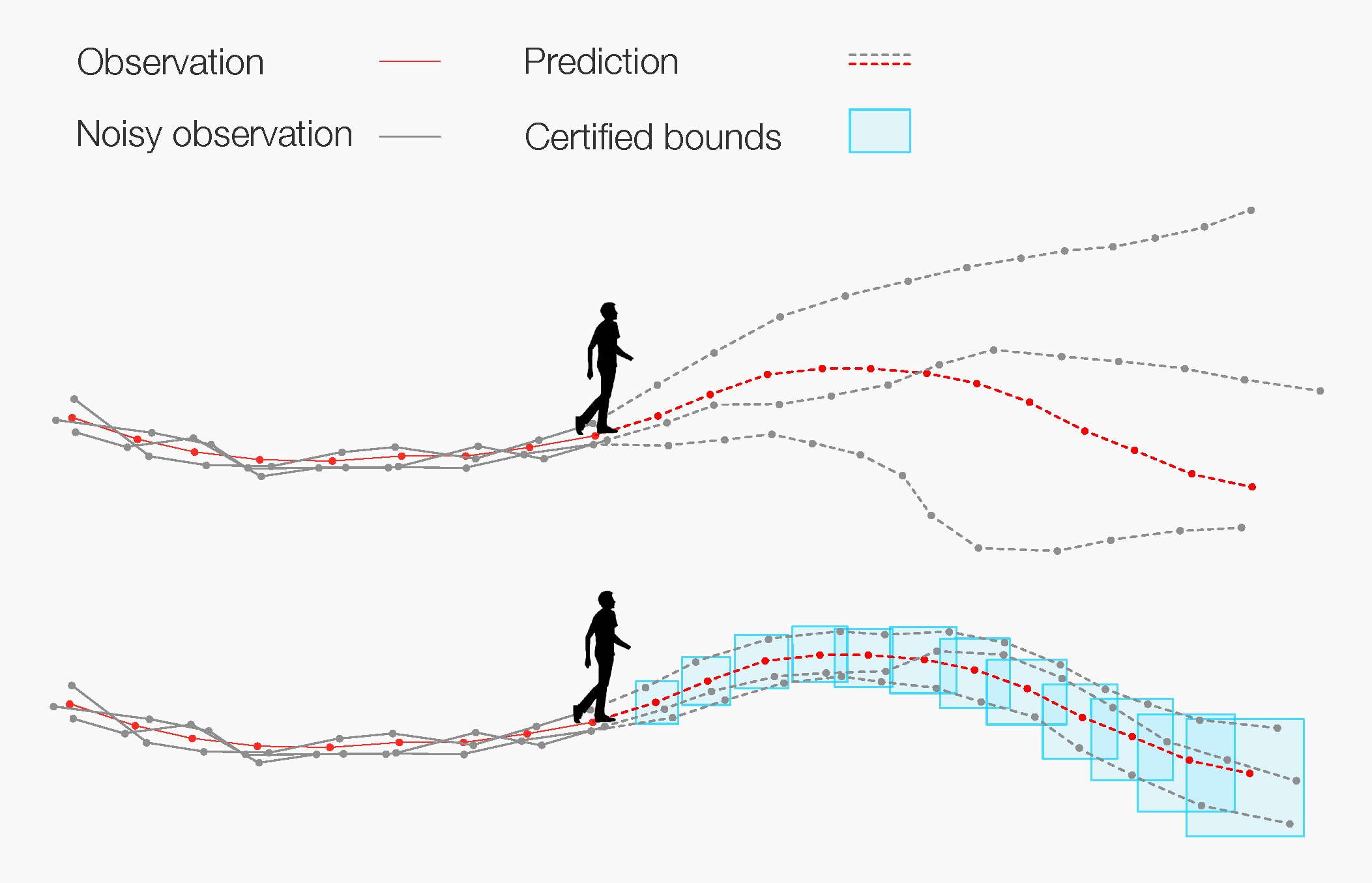
Certified Human Trajectory Prediction
The certified trajectory predictors provide guaranteed performance even if the input is noisy.